
Auf Mission zu unbekannten Welten und Planeten, wo noch nie zuvor ein Mensch gewesen ist.
Gibt es dort vielleicht sogar intelligentes Leben?
Unsere erste Mission: Das Lehrerzimmer.
Bild der geplanten FlugrouteDie Aufgabe:
Die ersten vorbereitenden Missionen:
Auf Basis des Schnellbau-Roboters begann der erste Schritt ins All. Das Programm bestand nur aus 2 Bausteinen: 10 Radumdrehungen vorwärts und danach 10 Radumdrehungen rückwärts.
Derselbe Roboter, leicht modifiziertes Programm: 20 Radumdrehungen.
Derselbe Roboter, nun aber 150 Radumdrehungen vorwärts, keine Rückwärtsfahrt. Stattdessen wird eine Sicherheitsleine mitgezogen.
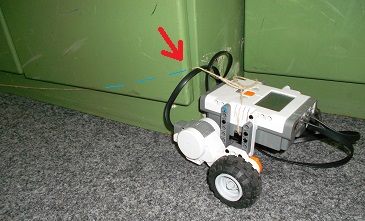
Im Bild der Roboter, dessen Sicherungsleine sich unter der Kante einer Schließfachtür verhakt hat
- siehe roter Pfeil. Blau gestrichelt der Verlauf der Leine hinter der Schließfachtür.
Das Programm ist zu Ende gelaufen,
der Roboter wurde an der Leine bis zu diesem Punkt zurück gezogen.
Das Motorkabel schiebt die Leine noch weiter nach oben.
An dieser Stelle muss eine Rettungsmission gestartet werden,
um den Roboter in Raum 319 zurückzuholen.
Dieser Teil schien einfach zu sein.
Aber es stellte sich heraus, dass diese Aufgabe erheblichen Zeitaufwand benötigte.
Verbunden war dies aber auch mit einem Gewinn an Erfahrungen.
Hier der Link zur Seite mit der Rettungsmission.
Wieder kam der Schnellbrauroboter zum Einsatz. Nach den Erfahrungen der vergangenen Missionen wurde die Befestigung des Hinterrads verbessert. Zudem wurde die Befestigung der Sicherheitsleine überarbeitet.

Bei den Tests wurde festgestellt, dass die beobachtete Kursabweichung wohl von der Programmsteuerung der Motoren stammt. Dass durch den Teppichboden eine Abweichung kommen würde, war erwartet worden. Allerdings war eine ähnliche Abweichung dann auch bei den Tests auf dem Linoleumboden im Raum 319 zu beobachten. Der Roboter hatte offensichtlich einen "Eigendrall". Je mehr Umdrehungen ein einzelner Programmblock enthielt (beide Antriebsmotoren vorwärts), desto mehr Abweichung. Das erscheint natürlich: je mehr Strecke zurück gelegt wird, desto größer summiert sich die Abweichung. Dann aber wurde das Programm leicht verändert: Nach jeder vollen Motorumdrehung wurde eine Pause gemacht. Die eigentliche Absicht: In diesen Pausen sollte die Funkverbindung getestet werden. Zu unserem Erstaunen wirkten sich diese Pausen auch auf die Abweichung aus: Sie wurde geringer! Anscheinend benötigt der NXT eine Unterbrechung in der Motorbewegung, um den Unterschied in der Drehzahl beider Motoren besser auszugleichen.
Der Test der Funkstrecke war auf die Bluetooth-Verbindung ausgerichtet. Zwischen Roboter und einem zweiten NXT-Baustein wurde eine Bluetooth-Verbindung aufgebaut. Jeweils in der Bewegungspausen wartete das Programm des Roboters auf ein Signal des zweiten NXT-Bausteins. Kam dieses Signal nicht innerhalb einer bestimmten Wartezeit, löste dieses Ausbleiben die Rückfahrt des Roboters aus. Dieses Signal wurde vom NXT-Baustein in Raum 319 aus gegeben. Allerdings wurde dieses Signal immer per manuellem Tastendruck gestartet. Genauer gesehen, hebelte es das Verbot der Fernsteuerung aus. Indem nämlich die Taste nicht gedrückt wird, kann nun ein "Befehl" zur Umkehr gegeben werden.
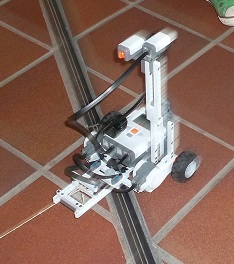
Diese Mission kam bis zur Treppe, wurde an dieser Stelle aber wegen der Gefahr eines Absturzes beendet. Im Bild ist der Roboter an seinem letztem Wegpunkt zu sehen, links davon befindet sich die Treppe. Das schwarze Teil, das auf dem NXT-Baustein sitzt, ist übrigens die Mini-Kamera.
Mit diesem Flug sollte der Wegpunkt erreicht werden, an dem zukünftige Missionen eine Kursänderung machen. Der Roboter wurde hierzu mit einem Kompass-Sensor ausgerüstet. Weiterhin wurden die Funkverbindungen getestet.
Der Kompass-Sensor wurde an einem Mast an dem Roboter angebracht. Dieser Mast dient dazu, den Sensor weiter von magnetischen Feldern der Motoren zu entfernen, die seine Messungen und Werte möglicherweise verfälschen könnten.
Am gleichen Mast wurde auch noch eine Art Kontroll-Lampe (LED des Lichtsensors) angebracht. Mit der leuchtenden LED des Lichtsensors zeigte der Roboter den erfolgreichen Empfang eines Bluetooth-Signals von Raum 319.
Das Steuerprogramm des Roboters beinhaltete ebenfalls einen Timer: Bei der Vorwärtsfahrt wurden die Umdrehungen (Gradzahl) summiert. In regelmäßigen Abständen wurde der Timer für eine Bluetooth-Wartezeit gestartet. Lief der Timer aus, ohne dass ein Bluetooth-Signal empfangen wurde, wurde die Rückwärtsfahrt mit der bis dahin erreichten Gradzahl-Summe gestartet. Im Gegensatz zur Vorwärtsfahrt wurden dabei allerdings keine Zwischenpausen eingelegt und auch sonst keine programmierten Kurskorrekturen vorgenommen. Die Richtung der Rückwärtsfahrt wurde stattdessen durch leichtes Ziehen an der Sicherungsleine korrigiert.
Zur Richtungskorrektur bei der Vorwärtsfahrt diente der Kompass-Sensor. Bei jeder Pause wurden die Werte vom Kompass-Sensor für eine Korrekturbewegung benutzt. Der Roboter fuhr zwar einen ganz leichten Zick-Zack-Kurs, kam aber zum gewünschten Ziel.
Dieses Ziel war die mit schwarzem Gummi versehene Fuge im Kachelboden (im Bild zu sehen). Mit Hilfe dieser Fuge könnte bei zukünftigen Missionen der Wendepunkt für den nächsten Wegabschnitt bestimmt werden. Die Weiterfahrt des Roboters wurde bei dieser Mission aber immer noch per Bluetooth gesteuert. Ein Sensor zur Auswertung der Farbe des Bodens (bzw. seiner Helligkeit) war noch nicht eingebaut. Nach erfolgreicher Überfahrt dieser Fuge (dies war vom Raum 319 aus noch zu sehen), wurde kein weiteres Bluetooth-Signal mehr gegeben, und nach kurzer Wartezeit trat der Roboter dann programmgemäß seine Rückfahrt an. Mit kleinen Korrekturen per Sicherungsleine erreichte der Roboter wieder (vollständig) Raum 319.
Anstatt mit einem zusätzlichen Sensor die Bodenhelligkeit zu prüfen und so die schwarze Dehnungsfuge zu finden, wurde entschieden, sich der Wand der Lehrerbibliothek mit dem Ultraschallsensor zu nähern. Der Ultraschallsensor zur Abstandsmessung wird sowieso benötigt werden. Daher bot es sich an, ihn an dieser Stelle zu benutzen, um die Wand der Lehrerbibliothek zu finden.
Verschiedene Konzepte für eine Relaisstation wurden getestet und verworfen. Daher fand dieser Flug "solo" statt. Aktuell wird die Relaisstation als Anhäger ohne eigenen Antriebsmotor gebaut. Dieser Anhäger bekommt jedoch die Fähigkeit, sich selbst abzukoppeln und rutschfest aufzustellen. Zurück geholt werden soll er dann mit eigener Sicherungsleine. Voraussichtlich muss dazu aber der führende Roboter umgebaut werden. Die Anhängerversion ist jedoch noch in einer so frühen Bauphase, dass noch keine Entscheidung für den Einsatz (oder eine Neukonstruktion) getroffen werden kann.
Ziel dieser Mission war daher "nur", die Wand zu finden und vor ihr stehen zu bleiben. Auch wurde die Wegstrecke bis zu diesem Punkt gemessen. Für die Messung wurde die Summe der Drehungen eines Antriebsmotors verwendet.
An verschiedenen Programmteilen wurde gearbeitet. Insbesondere das Zusammenspiel von Kurskorrektur und Wendemanöver ist nicht einfach. Der Ansatz, einen voreingestellten festen Winkel für das Wendemanöver zu nehmen, verlängert Richtungsfehler der Kurskorrektur. Geflogen wurde ohne Minikamera, da diese seit einer Umkonfiguration keine Signale liefert. Beim Bau der Relaisstation wurde kein Fortschritt erzielt. Obwohl einige Flüge abgebrochen wurden, war die Rückkehr (dank Sicherheitsleine) jedesmal erfolgreich.