
Die Aufgabe scheint etwas leichter zu sein: Fernsteuerung ist hier erlaubt.
Aber, um es vorweg zu nehmen: Es war nicht nur eine Mission, es waren mehrere Rettungsmissionen nötig.
Diese Rettungsmissionen gerieten selber in Not, verloren Teile und verschlimmerten die Situation.

Auch dieses Rettungsfahrzeug entstand auf Basis des Schnellbau-Roboters. Aber es fuhr nicht als programmierter Roboter, sondern wurde per Bluetooth mit einer NXT-App über Smartphone ferngesteuert. Die Motoren fuhren mit den Standardvoreinstellungen dieser App mit hoher Leistung/Geschwindigkeit. Die Lenkung war mit dieser Voreinstellung schon schwierig und selten "feinfühlig". Die Steuerung der Greifklaue war aber eigentlich nur als "grob" zu bezeichnen. Deshalb war es eine gute Idee, auch dieses Fahrzeug an eine Sicherungsleine gelegt zu haben.
Anstatt die Sicherungsleine des ersten Roboters zu greifen, sollte gleich der Roboter gegriffen werden. Die Greifklaue wurde auch erfolgreich in die Kabel des Roboters gesenkt. Aber es war nicht möglich, den Roboter aus der Ecke herauszuziehen. Das Rettungsfahrzeug konnte seine Kraft nicht auf den Boden bringen. Auf der Hinterachse war höchstens das selbe Gewicht wie das des zu rettenden Roboters. (Man hätte es wissen können - im Robotersumo wird zwar nicht gezogen, sondern geschoben. Die Wirkung bei gleich schweren Gegnern ist vergleichbar - so gut wie keine!)

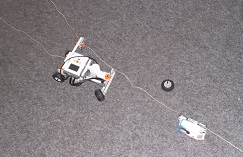
Die Befestigung des Greifklauenmotors war "unkompliziert" - es sollte einfach nur funktionieren. Insbesondere wurde nicht überlegt, welche Kräfte wirken. Und so kam es, dass sich das Rettungsfahrzeug selbst zerlegte. Beim Versuch, rückwärts zu ziehen, bewegte sich zuerst gar nichts. Dann lockerten sich jedoch Verbindungen und Greifklauenmotor und Stützradstrebe fielen ab. Weil der Greifklauenmotor per Kabel am NXT-Baustein hing, konnte er mitsamt Rettungsfahrzeug an der Sicherungsleine wieder zurückgezogen werden. Stützrad mit Strebe blieben aber neben dem zu rettenden Roboter liegen - siehe kleines Bild.

Das 2.Rettungsfahrzeug war bereits vorhanden (für einen anderen Zweck) und wurde kurzfristig umgebaut. Es war ein vierrädriges Fahrzeug mit gelenkten Vorderrädern. Der Umbau bestand aus dem Hinzufügen eines Auslegers zur Leinenführung. Nicht verändert wurde der Antrieb: 2 Motoren die jeweils mit Übersetzung die Räder antreiben. Das ursprüngliche Ziel dieser Konstruktion war: Das Fahrzeug sollte besonders schnell sein. Das war jetzt nicht unbedingt ein Ziel der Rettungsmission. Der Einsatz sollte ohne größere Neukonstruktion gehen. Und so wurde ein kaum getestetes Fahrzeug eingesetzt, mit offenen Zahnrädern (in denen sich eine Leine nicht gut auswirkt), dass schwer zu steuern war und sich bereits bei kurzem Tippen auf der Fernsteuerung schnell bewegte.
Der Ausleger sollte die Sicherungsleine einerseits zur Seite ziehen. Andererseits sollte er aber auch verhindern, dass sich das Rettungsfahrzeug in der Leine verfängt. Nicht getestet oder geprüft wurde beim Bau auch die Höhe der Leinenführung:
Und so zeigte sich bei der ersten Fahrt dieses Rettungsfahrzeugs, dass der Ausleger zu weit über dem Boden stand. Er konnte die Sicherungsleine nicht weit genug nach unten ziehen. Die Leine blieb weiterhin unter der Schließfachklappe.
Auf der Rückfahrt fuhr dieses Fahrzeug über die Sicherungsleine, was wegen der offenliegenden Zahnräder des Getriebes eigentlich hätte vermieden werden sollen. Glücklicherweise passierte dabei aber nichts. Das Fahrzeug kam heil wieder zurück.
Während der Ausleger umgebaut wurde, unternahm ein Teammitglied eine weitere Rettungsmission.

Prinzipiell musste die verhakte Sicherungsleine nach unten gezogen werden. Warum nicht mit einem Gewicht? Das Gewicht muss nur an der richtigen Stelle die Leine nach unten ziehen.
Dazu wurde eine kleine Schachtel mit Batterien gefüllt und mit Klebeband an eine Rollenkonstruktion geklebt. Diese Rollen liefen auf der Sicherungsleine. Um diese Gondel an die richtige Position rollen zu lassen, wurde die Sicherungsleine von Raum 319 aus weit nach oben gespannt.
Diese Aktion wurde ohne vorherige Tests durchgeführt. Es fand keine Beratung oder Absprache mit den anderen Teammitgliedern statt. Ein Fehler oder ein "Plan B" war nicht vorgesehen.
Das Ergebnis waren weitere "Trümmerteile". Die Gondel erreichte nicht ihr Ziel. Sie prallte mit hoher Geschwindigkeit auf die Kante des Schließfachs. Dabei ging die Schachtel auf und alle Batterien fielen heraus. Im Bild zu sehen sind die Gondel und die Batterien, die nach dem Herausfallen noch bis zum Roboter flogen und rollten.
Das vierrädrige Rettungsfahrzeug wurde nun mit einem tieferliegenden Ausleger gestartet. Aus der misslungenen Gondel-Aktion wurde gelernt, dass eine Sicherungsleine auch für die Rettungsmissionen sinnvoll ist. Es sollte sich zeigen, dass dies eine weise Entscheidung war.
Diesmal waren drei Teammitglieder an der Durchführung der Rettungsmission beteiligt. Ein Teammitglied steuerte das Rettungsfahrzeug. Das 2.Teammitglied sollte die Sicherungsleine des Rettungsfahrzeugs gerade halten. Das 3.Teammitglied sollte auf die Sicherungsleine des zu rettenden Fahrzeugs achten.
Zum einen gab es wieder Schwierigkeiten mit der nicht auf das Fahrzeug angepassten Steuerung. Eine "gefühlvolle" Steuerung war damit unmöglich. Zum anderen gab es einen Mangel an Kommunikation und Koordination zwischen den Teammitgliedern. Bevor das Rettungsfahrzeug auch nur in die Nähe einer wirksamen Position kam, fuhr es mehrfach über die verschiedenen Sicherungsleinen, und wickelte diese um Vorder- und Hinterachsen. Immerhin gelang es, die Gondel vom Schließfachschrank etwas wegzuziehen. Das Ziel der Leinenbefreiung wurde aber nicht erreicht. Weil sich die Sicherungsleine um ein Vorderrad wickelte, fiel dieses auf dem Rückweg ab (siehe Bild). Beim Zurückziehen des Fahrzeugs fiel dann auf den letzten Zentimetern auch das andere Vorderrad ab. Dank der Sicherungsleine konnte das Rettungsfahrzeug wieder zurück geholt werden, das zuerst abgefallene Vorderrad bleib jedoch als weiteres Trümmerteil liegen.

Zurück zu den Anfängen - der Schnellbauroboter wurde nun mit einer seitlichen Greifklaue eingesetzt.
Aber die Klaue setzte auf dem Boden auf. Auf glattem Boden war das kein Problem. Auf dem Teppichboden jedoch gab es dadurch erheblichen Reibwiderstand. Die Fahrtrichtung des Roboters wurde bei bestimmten Stellungen der Klaue verfälscht. Zudem war die Befestigung der Greifklaue keine besonders stabile Konstruktion. Und so blieb auch dieses Fahrzeug nicht verschont: Die Greifklaue fiel ab.Hiermit gelang es zwar, die Gondel und ein paar Batterien zu greifen. Eine besserer Erfolg als die vorherigen Rettungsmissionen! Aber dennoch konnte kein einziges Teil zurück gebracht werden.

Nach dem Motto "Keep it simple, stupid" wurde der Schnellbau-Roboter nun ohne Greifklaue eingesetzt. Der einzige Umbau war ein Schieber zwischen den Rädern an der Frontseite.
Hiermit gelang die erste Rettung: Teile wurden erfolgreich zurück geschoben (im Bild: das Vorderrad von Rettungsmission4) Die runden Batterien jedoch rollten weg.
Der Schieber wurde nun mehrfach verbessert und angepasst. Schließlich gelang es, den hängen gebliebenen Roboter zu befreien (im folgenden Bild ist dieser noch links zu sehen). Fast alle Trümmerteile wurden wieder eingesammelt. Lediglich drei Batterien blieben in einer Ecke liegen. Diese Ecke kann von Raum 319 nicht eingesehen werden und ist schwer zu erreichen. Auch aufgrund der vorgerückten Zeit beschloss das Team, diese Batterien nicht mehr zu holen und als Verlust "abzuschreiben".
Erwähnt sei an dieser Stelle noch, dass auch dieser Roboter ein Teil verloren hat: Sein hinteres Stützrad. Aber auch dieses konnte er selber zurück schieben.
